
TE Connectivity’s (TE) safety torque sensor has been designed to meet functional safety requirements up to ISO13849 Category 3 PL d thanks to two electrically segregated channels with no common cause failure. In addition, high overload capability helps prevent device failure.
Our safety torque sensor has been primarily designed for collaborative robot applications and to be assembled on Harmonic Drive gear boxes that result in highly complex stress state. The sensor design is then optimized to reduce axial, radial load and tilting moment susceptibility providing increased accuracy.
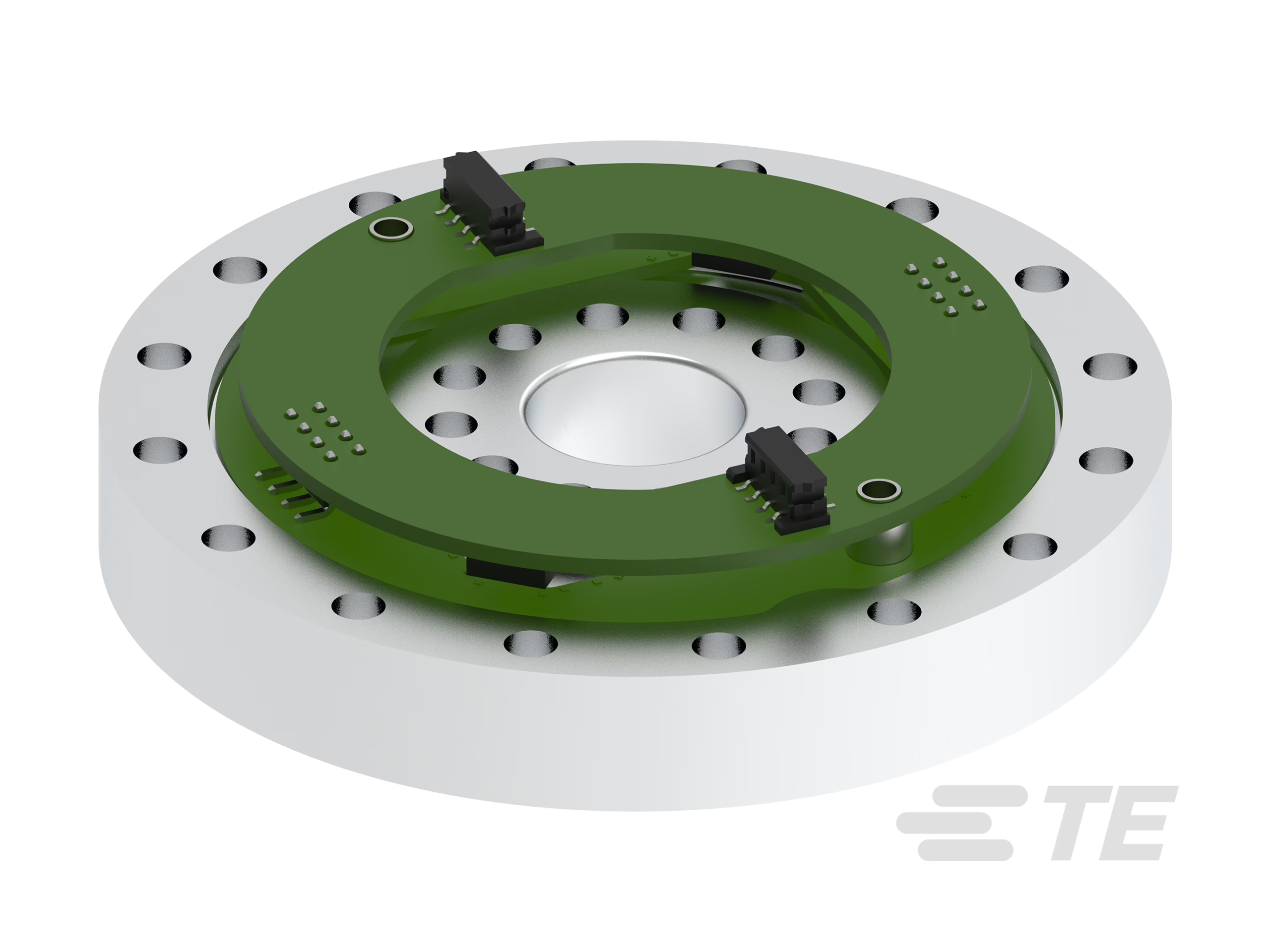
Systems like robots require highly integrated components and our safety torque sensor is available with customized mechanical interfaces. The basic concept of the sensor is always the same (low profile sensor with overall height lower than 20mm) but it can be easily adapted in terms of size and sensing range to meet customer application requirements. If needed, the sensor can be used as a sealing wall to seal a gear box.
The standard electrical interface is an I²C serial digital interface with 400kHz communication rate allowing ease of integration.
Microfused technology eliminates age-sensitive organic epoxies used in traditional load cell designs, thus providing excellent long-term span and zero stability because potential problems with resin ageing are avoided.
Strain gages are bonded to the mechanical part using innovative Microfused technology from TE. This technology is based on micromachining silicon piezo-resistive strain gages and fusing them in a high-temperature glass-bonding process to a high-performance stainless-steel substrate. This very mature and reliable process has delivered millions of force sensors, which are well proven
| Torque range | From 20Nm to 900Nm (14.7 ft-lbf to 664 ft-lbf) |
| Dimension | Outer diameter: from 65mm (2.56in) minimum to 140mm (5.51in) typically (smallest diameters are limited by torque transmission capabilities). |
| Overall height | 20mm (0.79in) typ. |
| Materials | High strength stainless steel (17-4PH) or Titanium (Ti-6Al-4V) housing and FR4 PCB. |
| Mass | Depending on interface requirements and material, typical value for 100 Nm (73.7 ft-lbf) range is less than 200 gr (0.4 lb). |
| Overload | ±300% of nominal torque range. |
| Structural torque | ±500% of nominal torque range. |
| Stiffness | > 100 000 Nm/rad (73 600 F ft-lbf/rad) |
| Non-Linearity | ±0.25%FS maximum. |
| Hysteresis | ±0.25%FS maximum. |
| Resolution | 0.025%FS maximum. |
| Temperature | 0°C to +85°C compensated range. -40°C to +105°C operating range. |
| Overall accuracy | ±1.5%FS typ. including Non-linearity, Hysteresis, Span setting and Thermal drifts. |
| Channel difference | ±2%FS typ. including Non-linearity, Hysteresis, Span setting and thermal drifts. |
| Cross loads susceptibility | Axial load: ±0.2%FS typ. (axial load is equivalent to torque range, 100N for 100Nm range) Radial load: ±0.2%FS typ. (radial load is equivalent to torque range, 100N for 100Nm range) 1%FS tilting moment: ±0.2%FS typ. (higher loads or tilting moment would require thicker sensor) |
| Power supply | 5 Vdc ± 0.15 Vdc typ. |
| Current consumption | < 10 mA per channel. |
| Electrical interface | I²C. |
| Digital output | 16 Bit output register. |
| Bandwidth | 1000 Hz minimum. |
| Communication rate | I²C: 400 kHz maximum |
| Environmental spec. capability | Vibration, shock, temperature, humidity acc. to EN 60068. EMC (ESD, radiated field immunity, surge immunity) acc. to EN 61000-4. |
Improving Safety Performance in Cobots with Torque Sensors
Ways Joint Torque Sensors Help Improve Safety Performance in Cobots















