

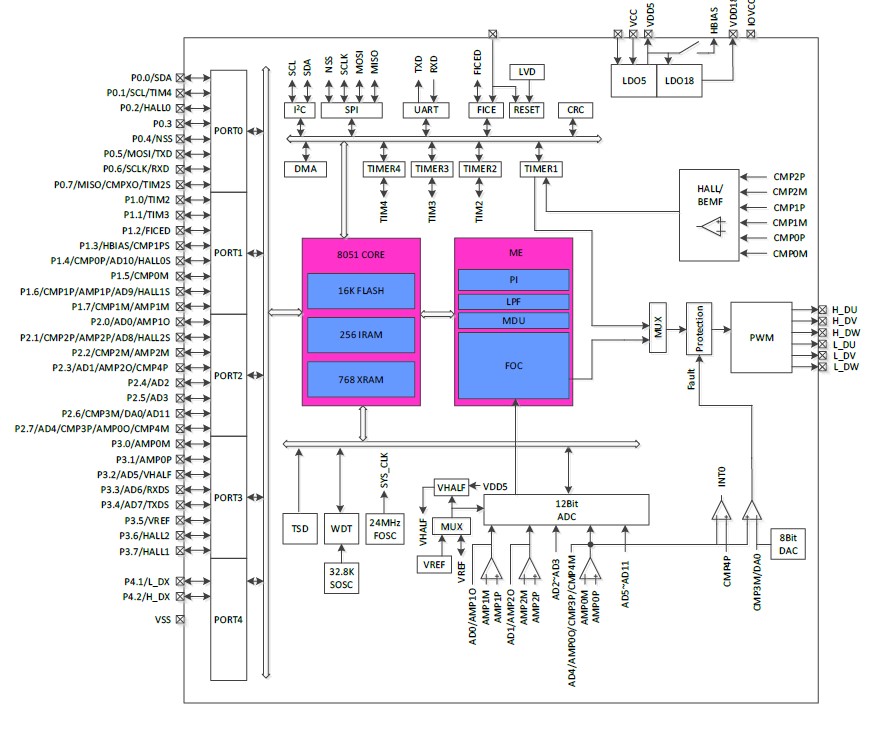
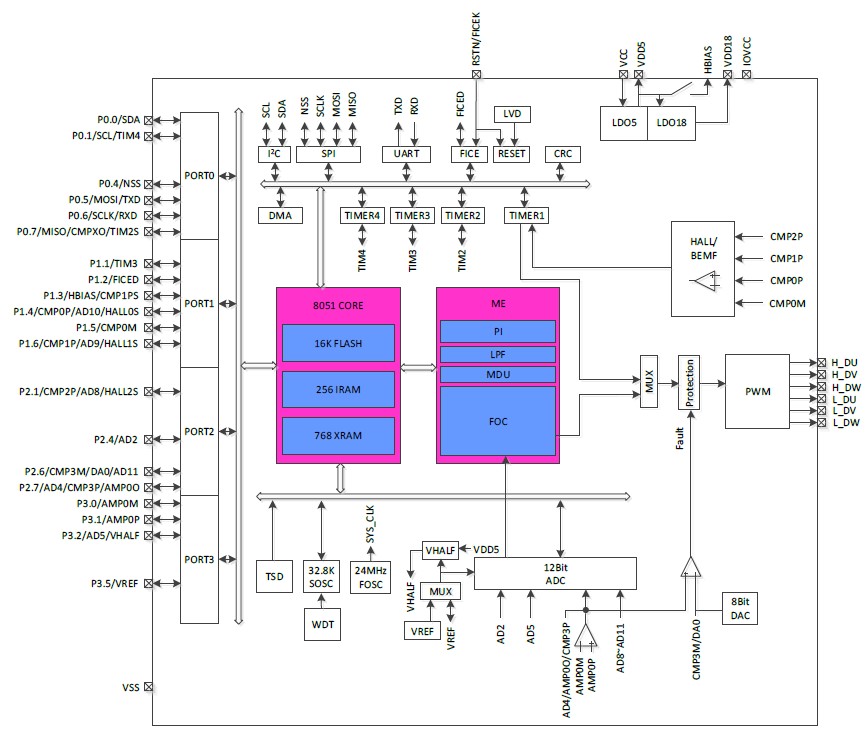
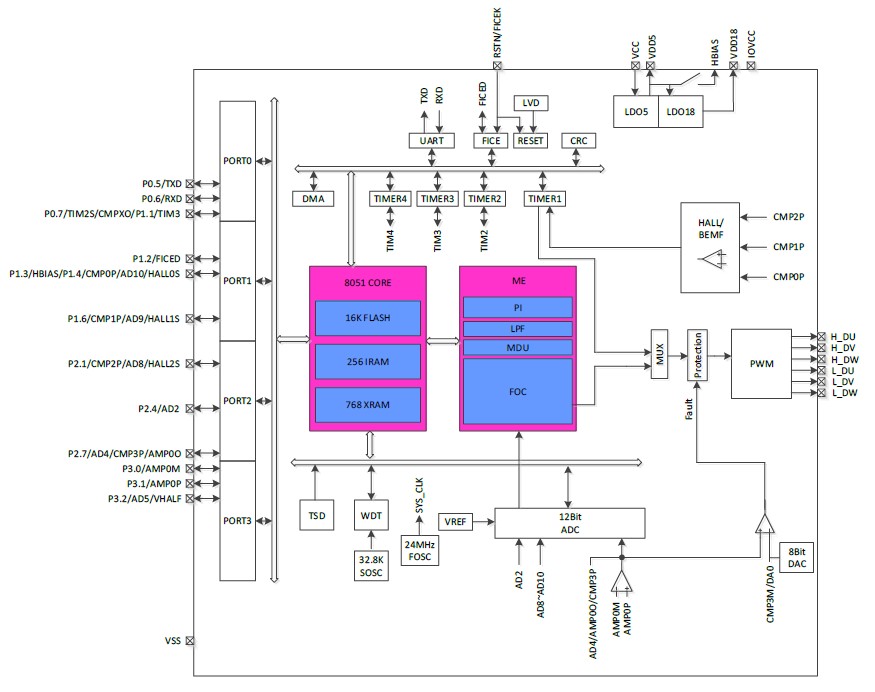
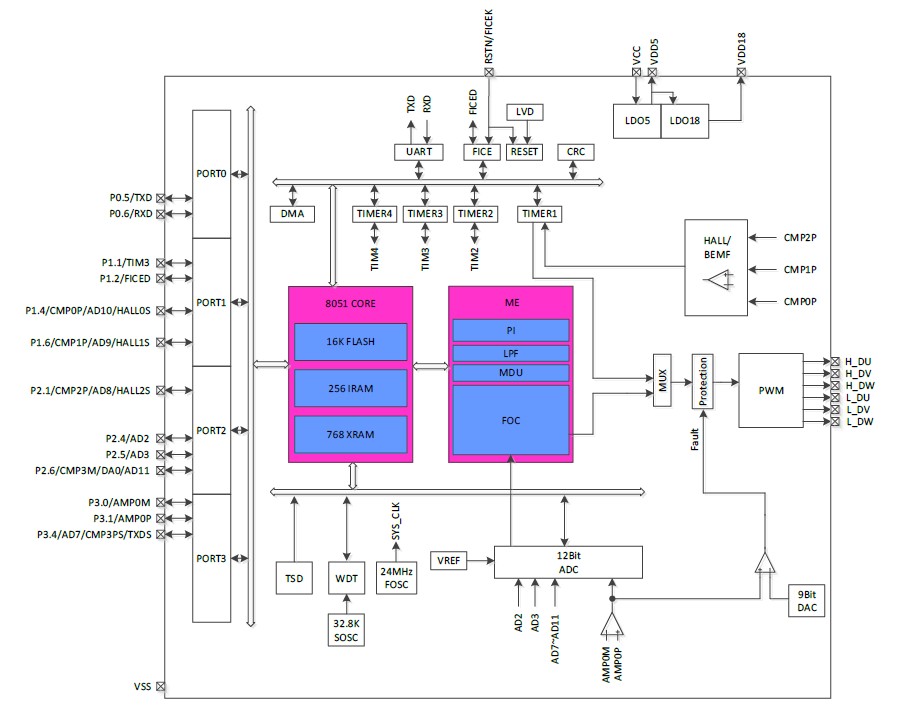
The high-performance motor drive chip incorporates MotionEngine ME core and 8051 core with 16K FLASH and 1k RAM.
ME core integrates FOC, MDU, LPF, PID and SVPWM modules that allow for automatic calculation of FOC or square-wave control by the hardware for sensored/sensorless BLDC/PMSM motors. 8051 core is used for parameter configuration and routine processing. Most of 8051 core instruction cycle takes 1T or 2T clock cycle(s).
The dual cores work in parallel to achieve high-performance motor control. The chip integrates high-speed operational amplifiers, comparators, high-speed ADC, multiplier/divider, CRC, Serial Interfaces, Timers, PWM module and high-voltage LDO, which are suitable for FOC or square-wave based BLDC/PMSM motors.
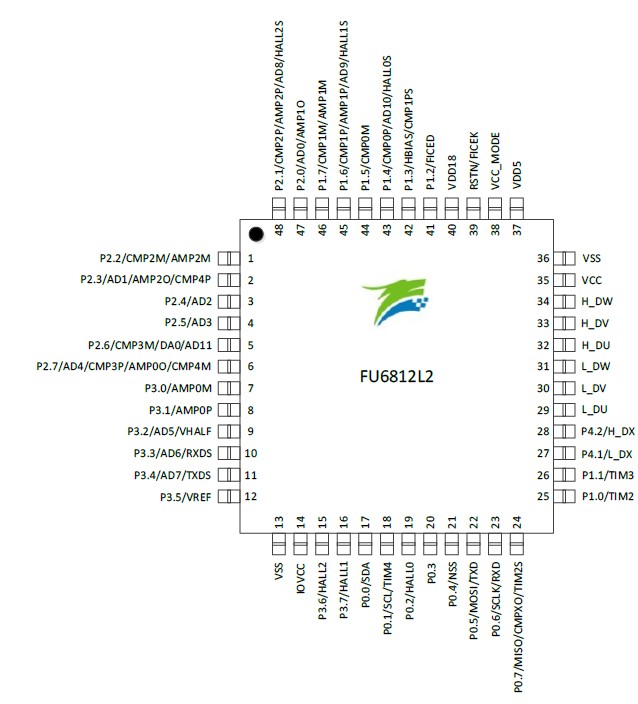
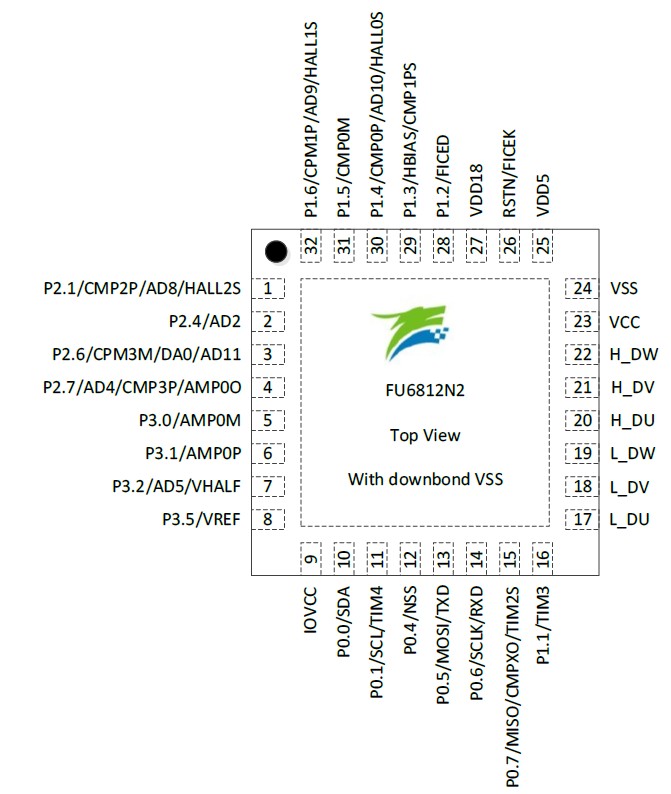
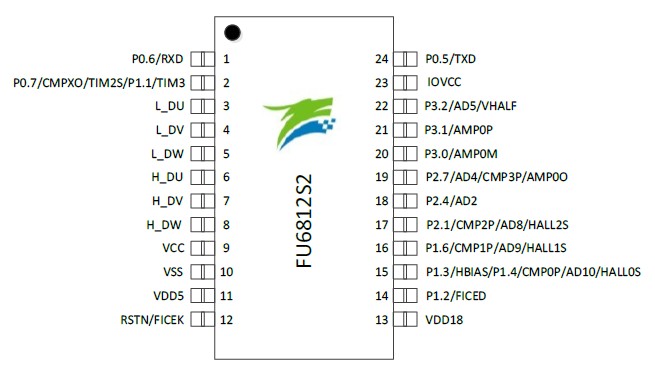
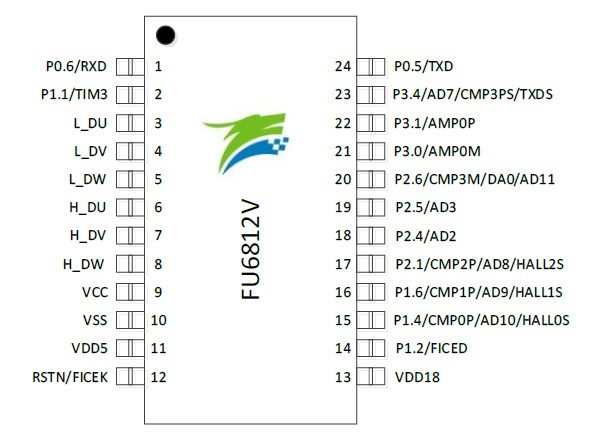
| P/N: | FU6812 L2 | FU6812 N2 | FU6812 S2 | FU6812 V |
| Package | LQFP48 7×7 mm | QFN32 4×4 mm | SSOP24 | SSOP24 |
| Motion Engine ME | x | x | x | x |
| FOC Hardware | x | x | x | x |
| SVPWM Hardware | x | x | x | x |
| BLDC Hardware | x | x | x | x |
| Single Phase | – | – | – | – |
| PI/PID | 4 | 4 | 4 | 4 |
| LPF | 4 | 4 | 4 | 4 |
| MDU | 4 | 4 | 4 | 4 |
| Sin/Cos/Atan | 4 | 4 | 4 | 4 |
| PFC Hardware | – | – | – | – |
| MCU core | 8051 | 8051 | 8051 | 8051 |
| MIPS [MHz] | 24 | 24 | 24 | 24 |
| Flash [kB] | 16 | 16 | 16 | 16 |
| RAM [kB] | 1 | 1 | 1 | 1 |
| GPIO | 32 | 20 | 12 | 13 |
| I²C | 1 | 1 | – | – |
| UART | 1 | 1 | 1 | 1 |
| SPI | 1 | 1 | – | – |
| CAN | – | – | – | – |
| LIN | – | – | – | – |
| DMA | 2 | 2 | 2 | 2 |
| Timer | 6 | 6 | 6 | 6 |
| WDT | 1 | 1 | 1 | 1 |
| PreDriver- | – | – | – | – |
| Driver Voltage, max. [V] | – | – | – | – |
| Drive Current, max. + [A] | 0,05 | 0,05 | 0,05 | 0,05 |
| Drive Current, max. – [A] | 0,1 | 0,1 | 0,1 | 0,1 |
| Sensor/Sensorless Square Wave | x | x | x | x |
| Sensor SVPWM | x | x | x | x |
| Sensor FOC | x | x | x | x |
| Sensorless FOC | x | x | x | x |
| ADC | 1 | 1 | 1 | 1 |
| ADC channels | 12 | 7 | 6 | 7 |
| ADC resolution [bit] | 12 | 12 | 12 | 12 |
| DAC | 1 | 1 | 1 | 1 |
| DAC resolution [bit] | 8 | 8 | 8 | 9 |
| OP | 3 | 1 | 1 | 3 |
| Comparator | 3 | 2 | 2 | 2 |
| Temp. Range (5-12V) | -40…105°C | -40…105°C | -40…105°C | -40…105°C |
| Temp. Range (5-24V) | -40…85°C | -40…85°C | -40…85°C | -40…85°C |
| P/N: | FU6812 | FU6813 | FU6815 | FU6816 |
| Package | LPQFP48 7*7 QFN32 4×4 mm SSOP24 |
LPQFP48 7*7 QFN32 4×4 mm LPQFP52 10x10mm |
LPQFP48 7*7 TSSOP28 |
LPQFP48 7*7 |
| Motion Engine ME | x | x | x | x |
| FOC Hardware | x | x | x | x |
| SVPWM Hardware | x | x | x | x |
| BLDC Hardware | x | x | x | x |
| Single Phase | – | – | – | – |
| PI/PID | 4 | 3 | 4 | 4 |
| LPF | 4 | 1 | 4 | 4 |
| MDU | 4 | 1 | 4 | 4 |
| Sin/Cos/Atan | 4 | 1 | 4 | 4 |
| PFC Hardware | – | x | x | – |
| MCU core | 8051 | 8051 | 8051 | 8051 |
| MIPS [MHz] | 24 | 24 | 24 | 24 |
| Flash [kB] | 16 | 32 | 32 | 32 |
| RAM [kB] | 1 | 1,75 | 4 | 4 |
| GPIO | 34/20/12/13 | 34/20/35 | 38/19 | 38 |
| I²C | 1/- | 1 | 1 | 1 |
| UART | 1 | 2 | 1/2 | 2 |
| SPI | 1/- | 1 | 1/- | 1 |
| CAN | – | – | – | 1 |
| LIN | – | – | – | 1 |
| DMA | 2 | 2 | 2 | 2 |
| Timer | 6 | 6 | 6 | 6 |
| WDT | 1 | 1 | 1 | 1 |
| PreDriver- | – | – | – | – |
| Driver Voltage, max. [V] | – | – | – | – |
| Drive Current, max. + [A] | 0,05 | 0,05 | 0,05 | 0,05 |
| Drive Current, max. – [A] | 0,1 | 0,1 | 0,1 | 0,1 |
| Sensor/Sensorless Square Wave | x | x | x | x |
| Sensor SVPWM | x | x | x | x |
| Sensor FOC | x | x | x | x |
| Sensorless FOC | x | x | x | x |
| ADC | 1 | 1 | 1 | 1 |
| ADC channels | 6/7/12 | 9/14 | 12/14 | 16 |
| ADC resolution [bit] | 12 | 12 | 12 | 12 |
| DAC | 1 | 3 | 3 | 2 |
| DAC resolution [bit] | 8/9 | 9/8/6 | 9/8/6 | 9/6 |
| OP | 1/3 ( | 2/4 | 4 | 4 |
| Comparator | 2/3 | 4 | 4 | 3 |
| Temp. Range (3-5,5V) | -40…125°C | |||
| Temp. Range (5-12V) | -40…105°C | -40…105°C | ||
| Temp. Range (5-24V) | -40…85°C | -40…85°C | -40…85°C | -40…85°C |

3-ph. Motor Control 8051 MCU+ME with Gate-Driver 180V, sensorless FOC

USB programming and debug adapter for Fortior motor controllers with integrated MCU

3-ph. Motor Control 8051 MCU+ME with 6N Gate-Driver 600V, sensorless FOC

3-ph. Motor Control 8051 MCU+ME with 6N Gate-Driver 600V, sensorless FOC

3-ph. Motor Control 8051 MCU+ME with 6N Gate-Driver 180V, sensorless FOC

Fully integrated 3-ph. Motor Control 8051 MCU+ME, 20V/1A, sensorless FOC













