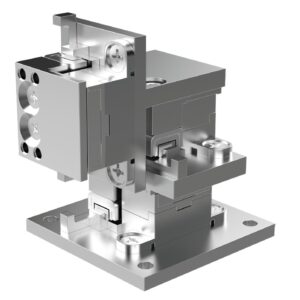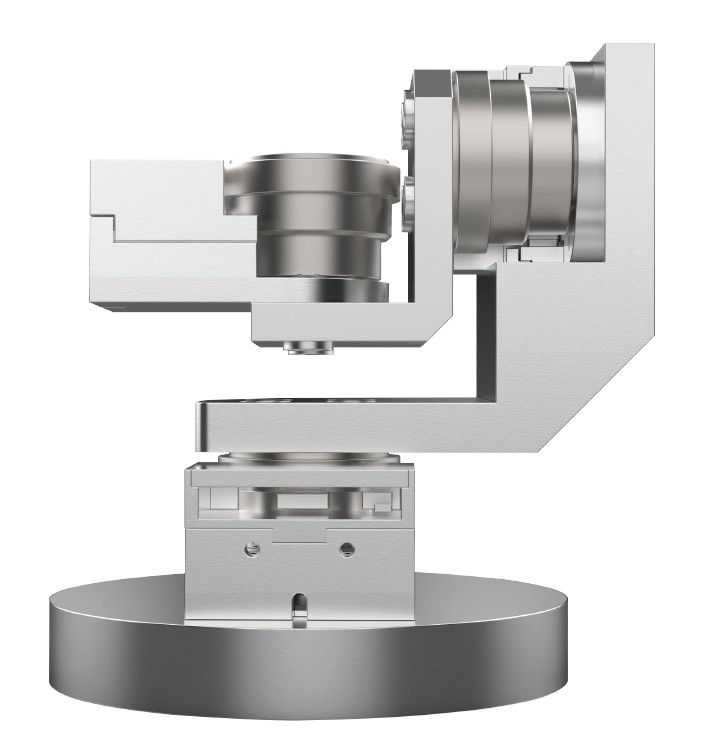

Introducing the ROMO-3AX the world’s smallest lightweight piezoelectric rotary 3-axis gimbal platform designed for superior precision and expanded functionality for advanced applications.
The ROMO-3AX system integrates three precision miniature rotary piezomotors (PMC Model# ROMO) into a compact rotary 3-axis gimbal stage, providing precise multi-axis motion in an ultra-small footprint. It is ideal for space-limited applications where silent operation, zero backlash, and sub-microradian resolution are required. The ROMO-3AX offers reliable, high-precision control for industries where traditional stepper or servo motors are too bulky, heavy or generate electromagnetic interference, making it ideal for next-generation motion solutions in photonics, life sciences, miniature drones and precision instrumentation.
The electronic driver is designed to offer an economical interface for user control. Motion of the motor is achieved via PWM (Pulse Width Modulation) control signals. The driver PCB also supports UART and I2C interfaces. The driver PCB is pre-programmed for software configurability, optimizing drive signals and integrating controls. Motor operation can be finely regulated through closed-loop control using an optional encoder factory-installed on the actuator.
| Series | ROMO-3AX (no encoder) |
ROMO-E-3AX (with encoder) |
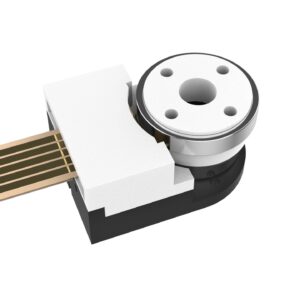
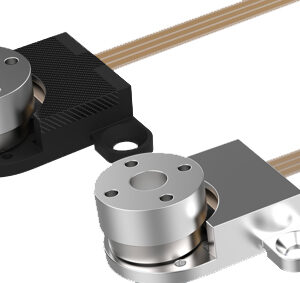
| Actuator Type | Rotary Piezoelectric Motor (Hollow Shaft) |
Rotary Piezoelectric Motor (Hollow Shaft) |
| Control Type (no encoder) | Open-Loop | Python™ API software included with Closed-Loop System |
| Actuator Dimensions (hollow shaft) | 13 × 23 × 8,15 mm | 13 × 23 × 9,15 mm |
| System Weight | 15 g | 17 g |
| Rotor Diameter | 13 mm | 13 mm |
| Hollow Shaft Diameter | 2,5 mm | 2,5 mm |
| Rotor Runout | < 50 µm | < 50 µm |
| Maximum Axial Load | 200 g | 200 g |
| Maximum Radial Load | 200 g | 200 g |
| Moment of Inertia | 29,2 g·mm² | 29,2 g·mm² |
| Self-Braking Torque | 5 mNm | 5 mNm |
| Stall Torque | 4 mNm | 4 mNm |
| Power Supply Voltage | 7,5 V DC | 5 V DC |
| Max Current (over velocity range) | 30 mA – 300 mA | 30 mA – 300 mA |
| Frequency Response | 4 kHz | 4 kHz |
| Actuator Response Time | 30 µs | 30 µs |
| Encoder Type | # | magnetic |
| Max Speed | 600 rpm | 600 rpm |
| Angular Backlash | 30 µrad | 30 µrad |
| Angular Hysteresis | 30 µrad | 30 µrad |
| Minimum Angular Step | 30 µrad | 30 µrad |
| Minimum Encoder-Controlled Angular Step | # | 6,1 mrad |
| Encoder Resolution (after quadrature) | # | 1,024 ppr |
| Uni-directional Repeatability | # | 6,1 mrad |
| Operating Temperature | −20 °C to +80 °C | −20 °C to +80 °C |
| Model | Part Number | Description |
| ROMO-3AX | ROMO-M3AX-0391-0000 | 3-Axis positioning system (non-encoder version), 3 X Driver PCB’s, I2C adapter board, Raspberry Pi Controller interface with LCD Display and Python API, 120/240 VAC to 5 VDC power adapter and cables. |
| ROMO-E-3AX | ROMO-M3AX-1391-0000 | 3-Axis positioning system (with optical encoders), 3 X Driver PCB’s, I2C adapter board, Raspberry Pi Controller interface with LCD Display and Python API close-loop software, 120/240 VAC to 5 VDC power adapter and cables. |
Piezo Driver (Blue PCB) closed loop for ROMO-E
Piezo Driver (Red PCB) open loop for LRMO & ROMO