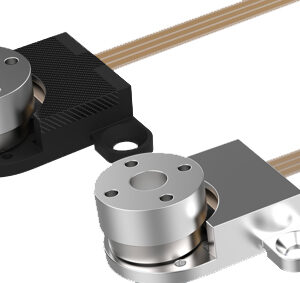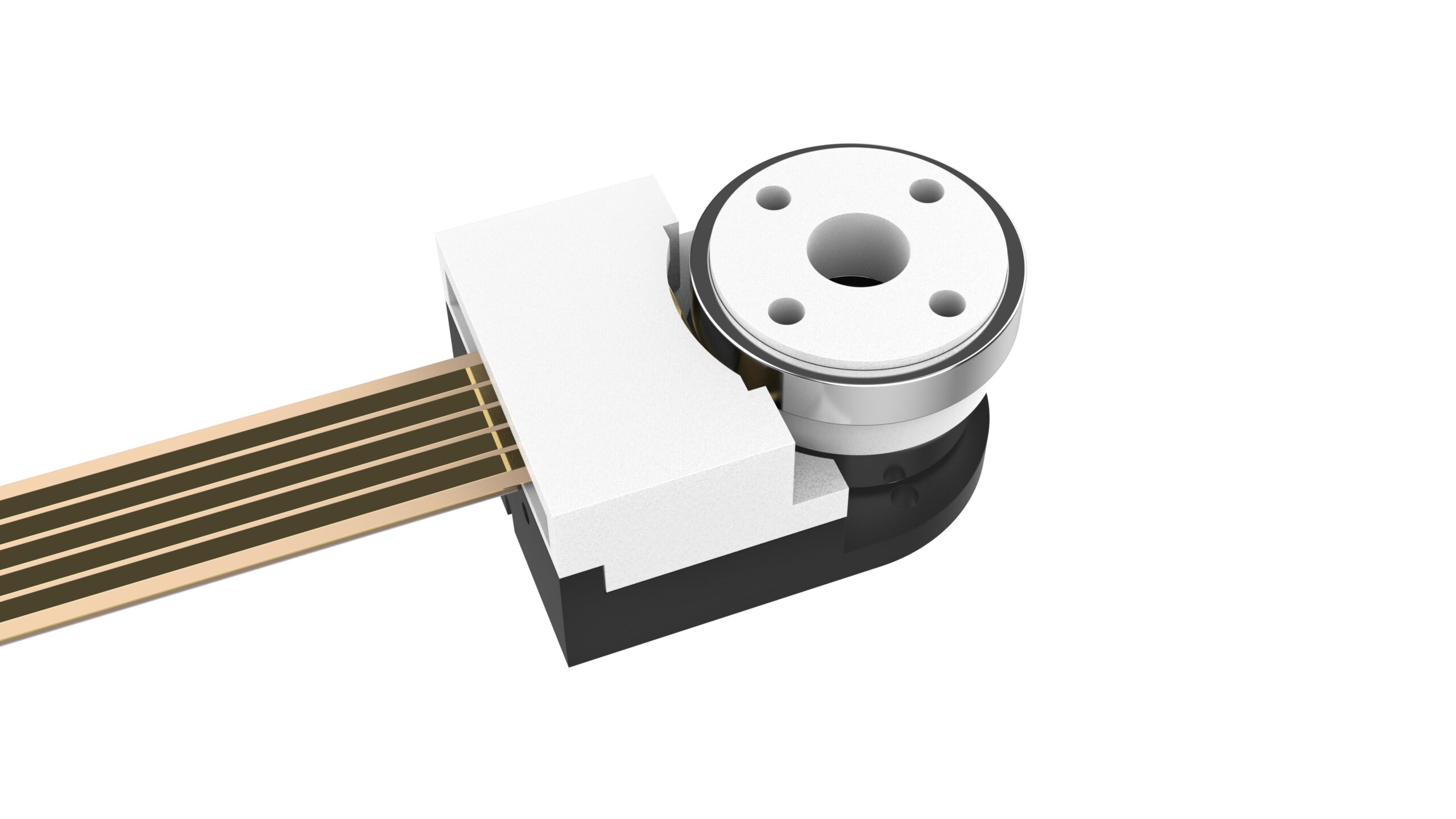


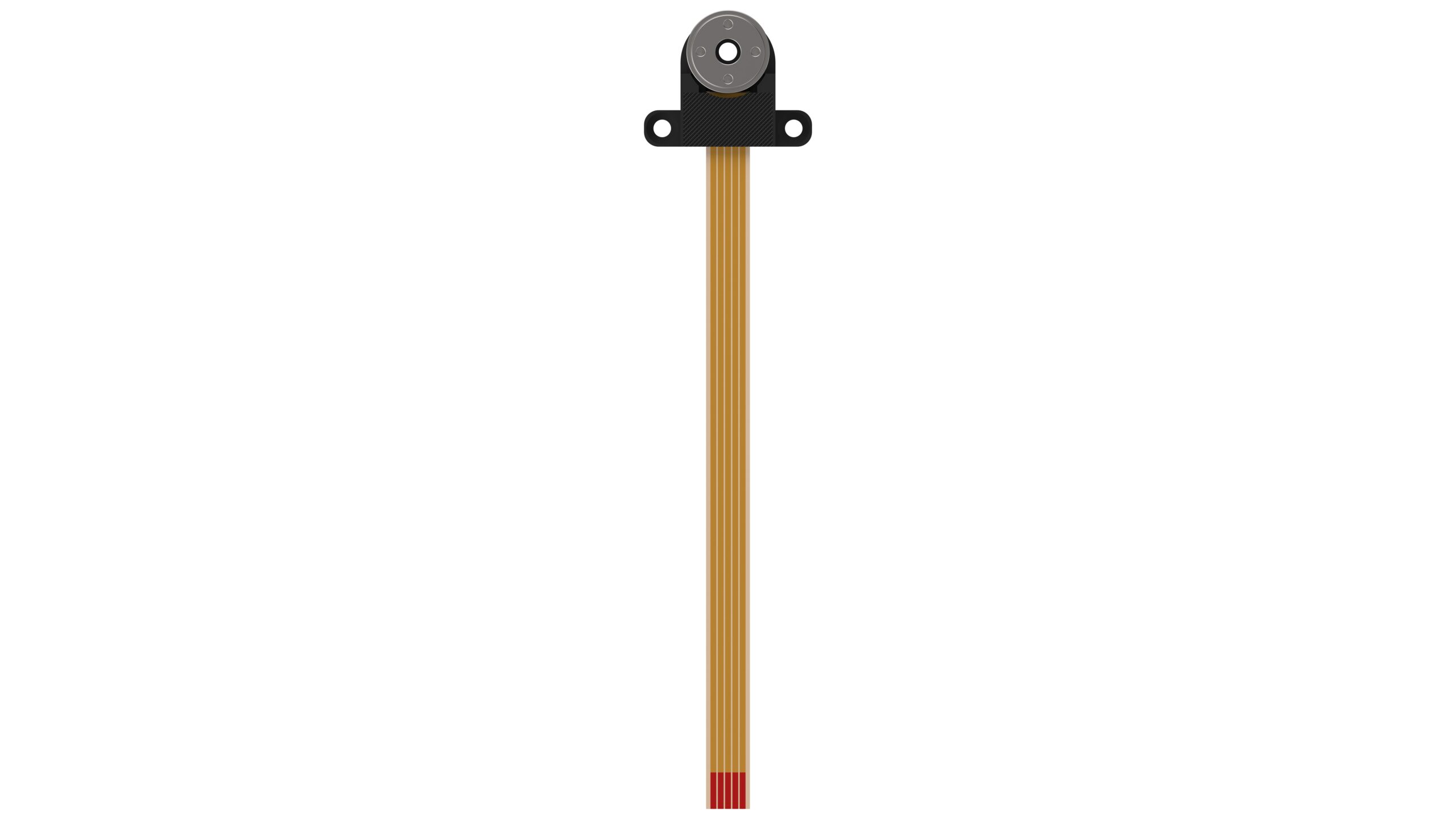
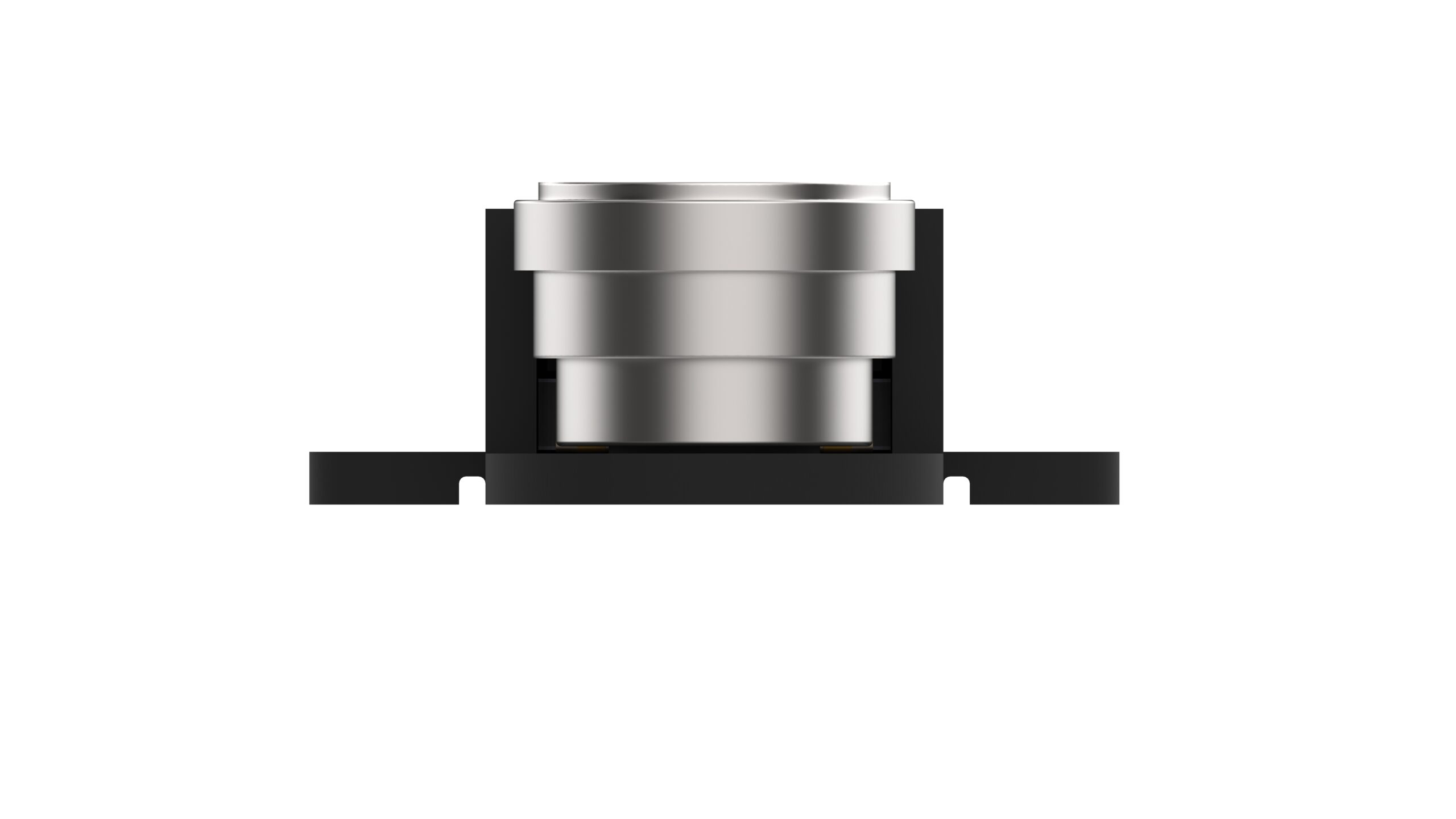
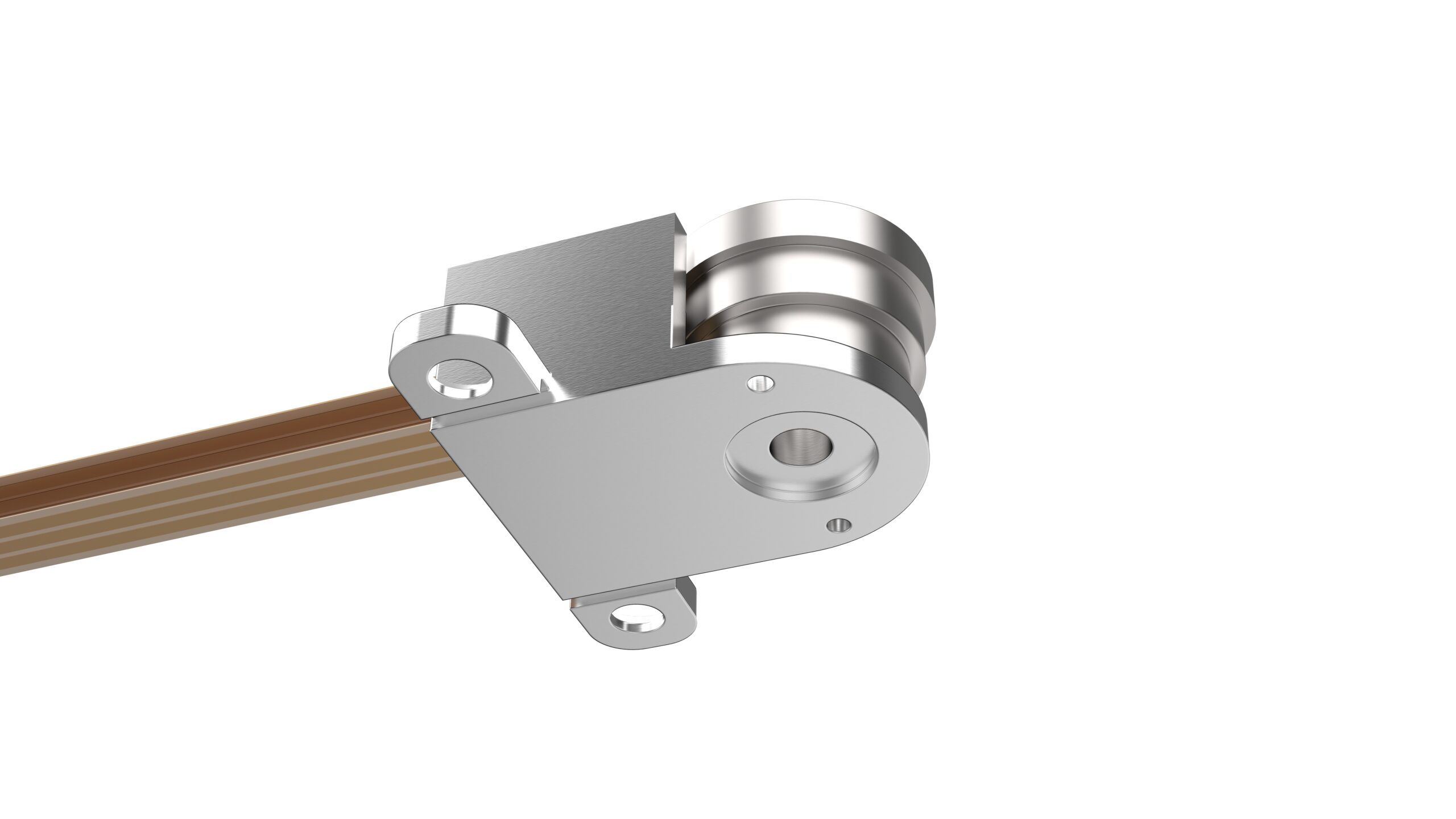
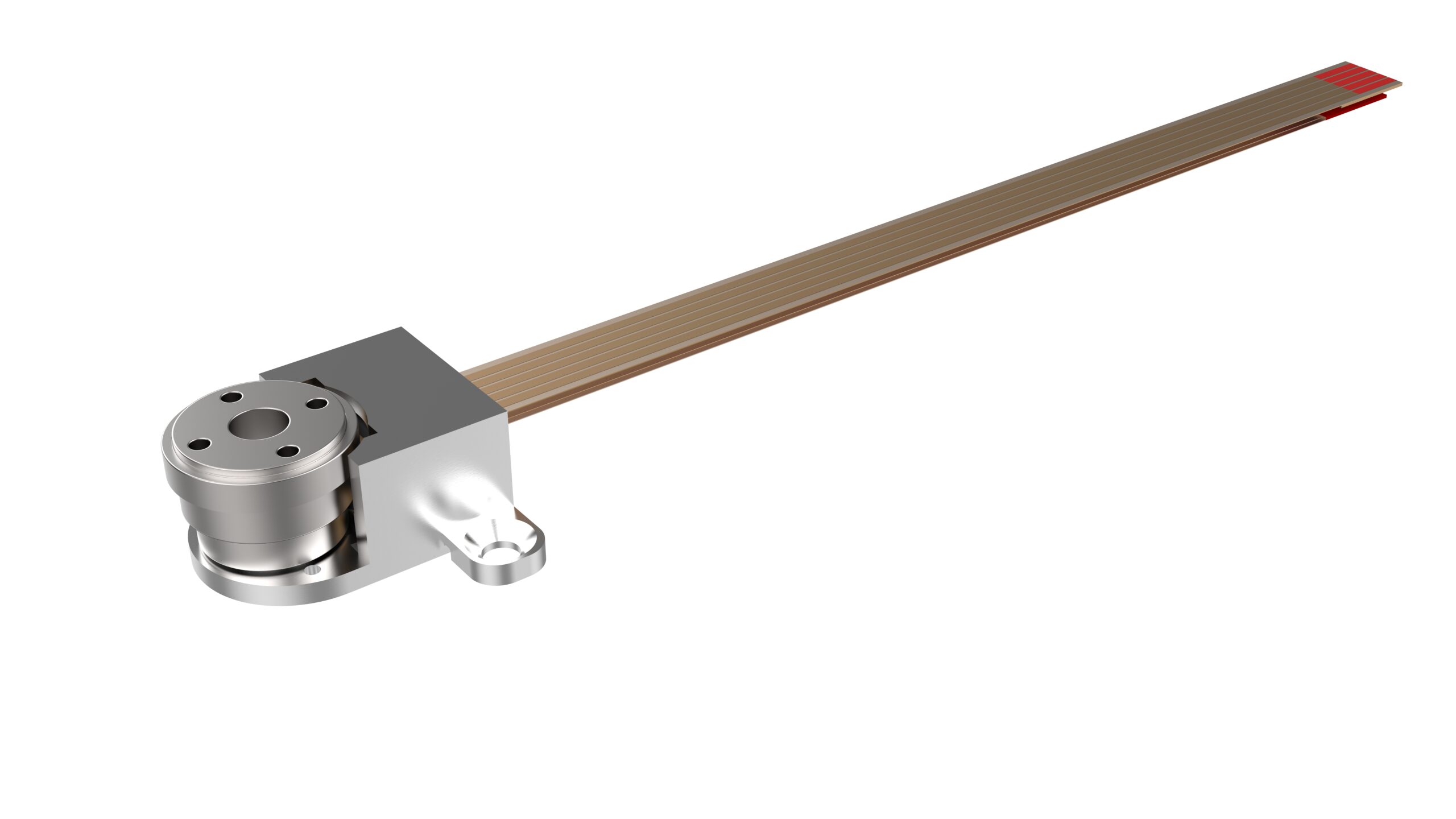
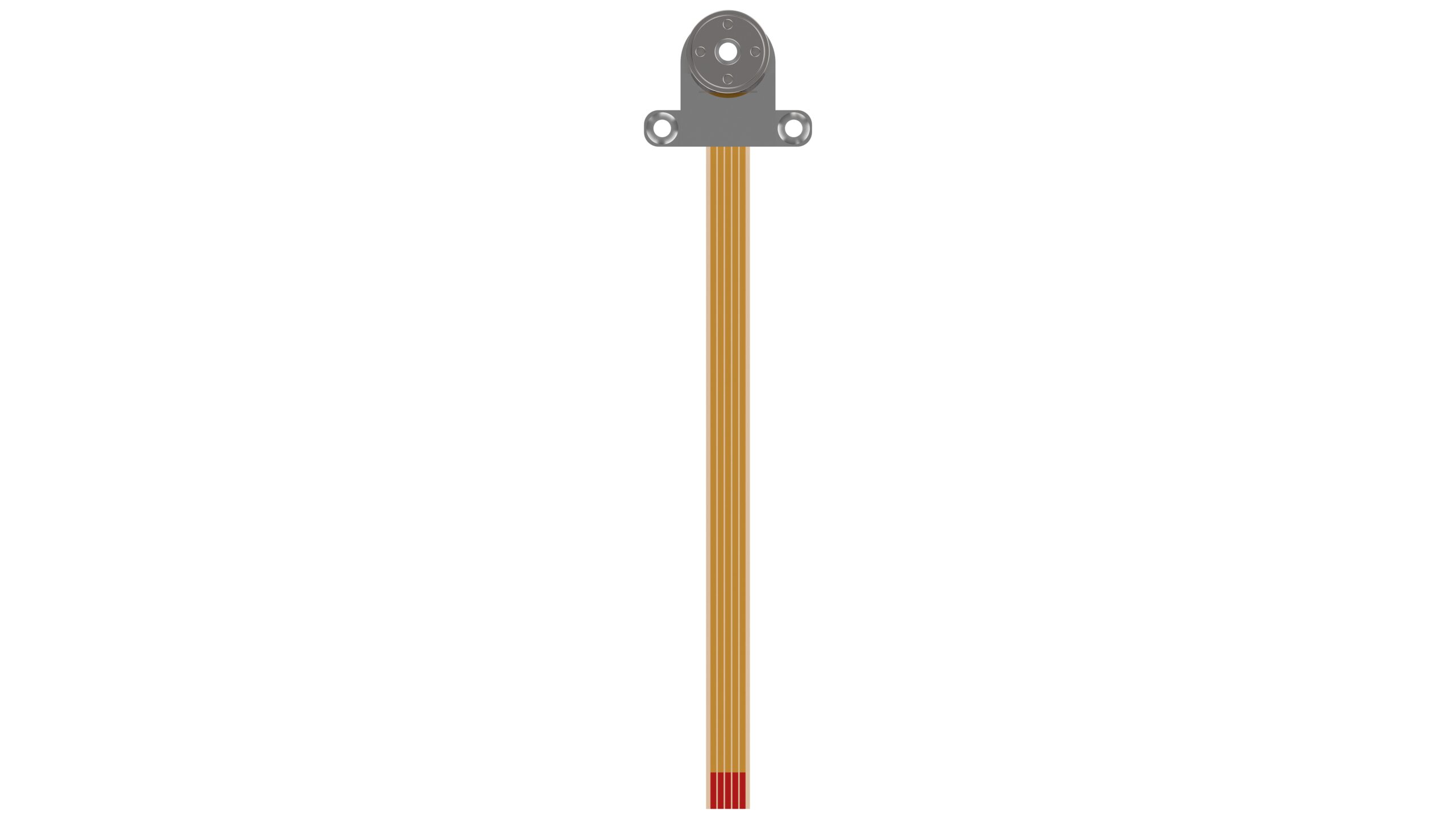
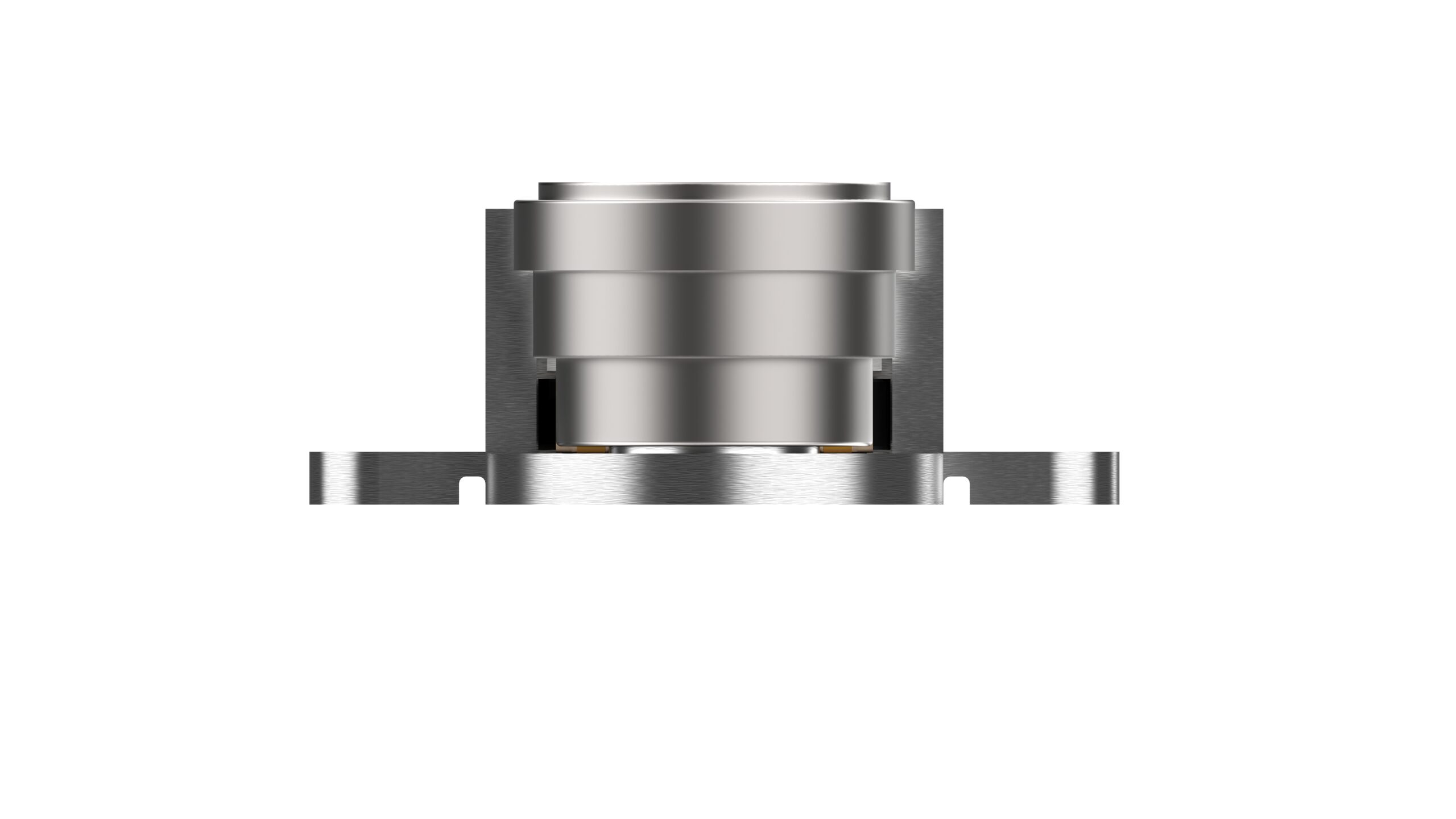

ROMO-E (plastic) and ROMO-E-M (metal) series piezo rotary motor with a plain hollow shaft and magnetic encoder.
Piezo Motor Company’s new range of miniature piezomotors sets new benchmarks for compact, high-performance rotary and linear piezoelectric actuators/motors. We’ve combined lightweight design with superior precision and functionality.
These piezomotors are exceptionally energy-efficient, requiring no power in the hold position while still maintaining full torque and force. This efficiency makes them ideal for demanding OEM applications where performance and cost-effectiveness are paramount.
Designed to operate at low voltage (5 V DC to 7,5 V DC) and small currents (e.g., 30 mA), the new PMC piezomotors are available with optional factory-installed encoders and boast several distinctive features:
| Series | ROMO-E |
| Product | ROMO-P011-1370-0000 (plastic) ROMO-M012-1370-0000 (metal) |
| Power Supply | 5 to 7,5 V DC |
| Stall Torque | ≥ 4 mNm |
| Self Braking Torque | ≥ 5 mNm |
| Actuator Response Time | » 30 µs |
| Max Speed | > 600 rpm |
| Minimum Angular Step | » 30 µrad |
| Encoder Resolution (after quadrature) | 1024 ppr |
| Minimum Controlled Angular Step* | 6,1 mrad |
| Uni-directional Repeatability* | 6,1 mrad |
| Angular Backlash | 30 µrad |
| Angular Hysteresis | 30 µrad |
| Frequency Response | 4 kHz |
| Operating Temperature | -20 °C to 80 °C |
| Maximum Axial Load | 200 g |
| Maximum Radial Load | 200 g |
| Moment of Inertia | 29.2 g·mm² |
| Max Current over velocity range | 30 – 300 mA |
| Rotor Runout | ≤ 50 µm |
| Actuator Weight | 3,5 g (plastic) 4 g (metal) |
| Actuator Dimensions (no shaft) | 13 x 18,7 x 9,1 mm |
| Model | Product / Order Code | Description |
| ROMO-E | ROMO-P011-1370-0000 | ROMO Rotary motor, plastic enclosure, withEncoder |
| ROMO-E-KIT | ROMO-P011-1371-0000 | ROMO Rotary motor, plastic enclosure, with Encoder, ROLR-PCB Electronic Driver PCB, cables, 120/240 VAC to 5 V DC or 7,5 V DC wall power adapter |
| ROMO-E-M | ROMO-M012-1370-0000 | ROMO Rotary motor, metal enclosure, with Encoder |
| ROMO-E-M-KIT | RROMO-M012-1371-0000 | ROMO Rotary motor, metal enclosure, with Encoder, ROLR-PCB Electronic Driver PCB, cables, 120/240 VAC to 5 V DC or 7,5 V DC wall power adapter |
| ROMO-E-KIT-CL | ROMO-P011-1281-0000 | ROMO Rotary motor, plastic enclosure, with Encoder, ROMO-E-PCB Electronic Driver PCB, Micro USB to USB adapter (5 V DC), cables and Python API software for Closed-Loop |
| ROMO-E-M-KIT-CL | ROMO-M012-1281-0000 | ROMO Rotary motor, metal enclosure, with Encoder, ROMO-E-PCB Electronic Driver PCB, Micro USB to USB adapter (5 V DC), cables and Python API software for Closed-Loop |
ROMO-E brochure (PDF)
ROMO-E manual (PDF)
ROMO-E manual closed loop (PDF)
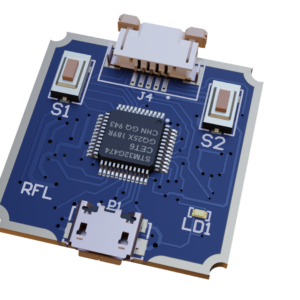
Piezo Driver (Blue PCB) closed loop for ROMO-E
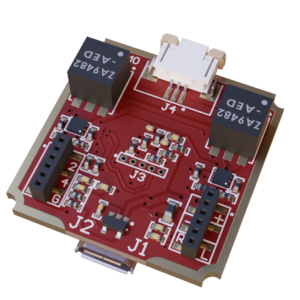
Piezo Driver (Red PCB) open loop for LRMO & ROMO